
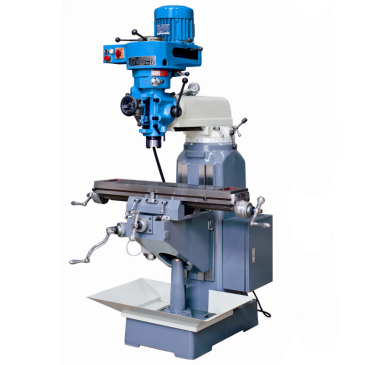
D5036A вертикальный фрезерный станок, мощные, широко диапазон обработки, автоматическая подача по двум осям, моторизованный подъем по оси Z

D6036A является горизонтально-фрезерный станок, мощность подачи на две оси , моторизованный подъем по оси Z, трехосный закаленной, стальной-Тип сильный, хорошая устойчивость.

D36B является вертикально-горизонтальный фрезерный станок, вертикальный фрезерный головки это запатентованная фрезерная головка , является многоцелевой машиной, системы подачи по трем осям, автоматическая подача, крутящий момент, мощность сильная, три направляющие по оси .

D36BA фрезерный станок базируется на увеличении X36B установки поворотного стола на 45 градусов может быть достигнут фасонных частей обработки.

Числа, ширина и расстояние между Т - слот: 3X18X70
Spindle taper: R8/ NT40

D6325W в оригинальные 3S 4S башни фрезерования основаны на установке отдельной горизонтальной фрезерной системы питания на две оси, можно установить лифт системы на ось Z в соответствии с потребностями заказчика, вы можете добавить долбежные головки , подходит для запасных частей обработки и изготовления пресс-форм.

D6332B используется высокоскоростная фрезерная головка, мощный, скоростной диапазон. Максимальная составляет около 5440 р.п. м. автоматическая подача по двум осям, моторизованный подъем по оси Z,

D6332C используется высокоскоростная фрезерная головка, мощный, скоростной диапазон. Максимальная составляет около 5440 р.п. м. автоматическая подача по двум осям, моторизованный подъем по оси Z

D6325WG с высокоскоростной фрезерной головкой, высокой точности и высокой скорости.

Высокоскоростная фрезерная головка ,5 л. с., рабочий стол можно повернуть на 45 градусов обработки широкого диапазона, три оси автоматического питания, большой крутящий момент и сильный силы, 2hp для быстро движущихся 2000мм/мин.

D6336 с высокоскоростной фрезерной головкой, высокой точности и высокой скорости. Вертикально-горизонтальный двойного назначения,перемещения стола большой и стабильной, автоматической подачей по двум осям, моторизованный подъем по оси Z, 3 оси.
 DMTC-Rita
DMTC-Rita 15712369282
15712369282